Note to Internet Explorer users
If you are reading this using Internet Explorer, I recommend you to accept the execution of this script when IE
asks it.
Setting the angle of a vector
Now we can do the opposite: setting the angle of a vector, keeping its length the same.
Following the rules of trigonometry, if we want to set the angle of a vector of length R we have to set its
coordinates to the values given in this image.
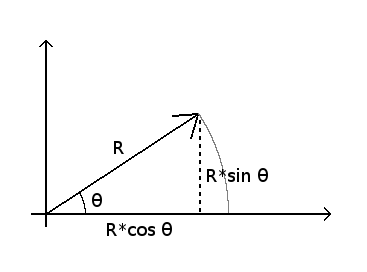
That leads to this code:
void Vec2f::setAngle(const float angle)
{
float R = mag();
x = R * cos(angle);
y = R * sin(angle);
}
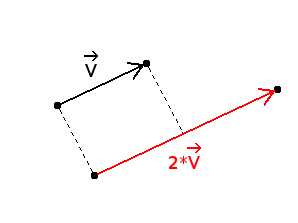
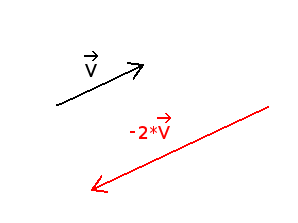
Multiplying a vector by a number
Multiplying it by a negative number also modifies its length, but reverts it too.
It is equivalent to multiplying each coordinate of the vector by the number.
Vec2f Vec2f::operator*(const float m)
{
Vec2f result;
result.x = m * x;
result.y = m * y;
return result;
}
Vec2f& Vec2f::operator*=(const float m)
{
x *= m;
y *= m;
return *this;
}
Dividing a vector by a number
It does not require more explanation.
Vec2f Vec2f::operator/(const float m)
{
Vec2f result;
result.x = x / m;
result.y = y / m;
return result;
}
Vec2f& Vec2f::operator/=(const float m)
{
x /= m;
y /= m;
return *this;
}
Normalizing a vector
Reducing the length of a vector to 1 is an operation called normalization.
We simply have to divide the coordinates of the vector by its length.
void Vec2f::normalize()
{
float m = mag();
*this /= m;
}
vector are simply the cosine and sine of its angle.
Dot product
The dot product - also called scalar product - of 2 vectors and is written .
Its result is a number defined as .
That can be easily programmed:
float Vec2f::dot(const Vec2f& a)
{
return x * a.x + y * a.y;
}
where θ is the angle between and .
This formulation leads to various usages in computer science.
First, if and are normalized, the product gives us the cosine of the angle between them
without having to calculate the angle itself.
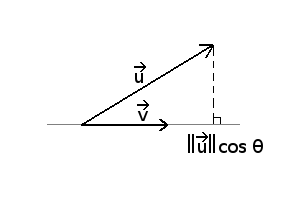
If one of the vectors is normalized, say , the dot product give us the length of the projection of on the line
that supports .
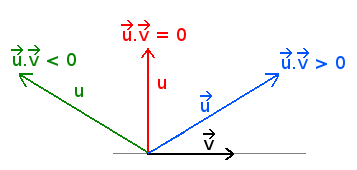
Even if the vectors are not normalized, looking at their product gives us informations on their relative position.
- If the product is positive, the vectors are in the "same" direction.
- If the product is zero the vectors are perpendicular.
- If the product is negative, the vectors are opposed.
Cross product
Unlike the dot product the result is a vector, and specifically a 3D one.
In fact this vector is perpendicular to the 2 input vectors.
So in 2D its x and y coordinates are zero. We only use its z coordinate that is defined as:
That translates to this code:
float Vec2f::cross(const Vec2f& a)
{
return x * a.y - y * a.x;
}
Where θ is the angle from to , and is the unit vector along the z axis.
This formulations leads to various useful properties.
If the 2 vectors are normalized, the product is the sine of the angle between them.
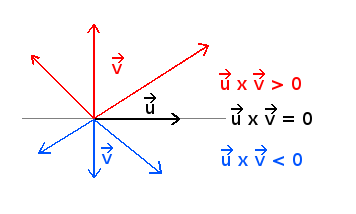
The sign of the product tells us on which side of the line defined by we can find .
In 2D the cross product can sometimes be used to compute distances, but it's mainly used to detect intersections
between lines.
It can also be used to tell the inside from the outside of a polygon.
Source code of the Vec2f class.